Smooth Functions
A smooth function is a differentiable function that does not change too abruptly. It is controlled by a smoothness parameter
Definition
A function
This inequality ensures that the function is not too steep, meaning that the graph of
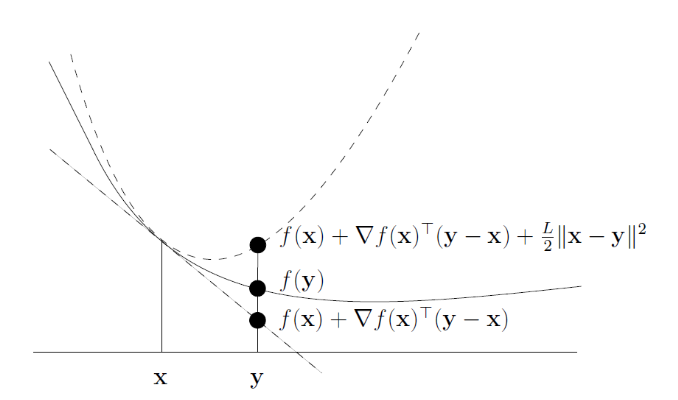
This formula is derived from the second-order Taylor expansion of
So, basically, instead of
The smoothness parameter
This quadratic term
This definition does not require convexity, meaning a function can be smooth even if it is not convex.
Geometric Intuition
At any point
Operations That Preserve Smoothness
Just like convexity, smoothness is preserved under specific operations:
1. Linear Combination of Smooth Functions
If
is smooth with parameter:
This means that taking a weighted sum of smooth functions preserves smoothness, and the new smoothness parameter is just the sum of the individual parameters.
2. Composition with an Affine Transformation
If
where
where
This means that applying a linear transformation to a smooth function still results in a smooth function, but the smoothness parameter gets scaled by the square of the spectral norm.
Characterization of Smooth Functions (Lemma)
If
-
is smooth with parameter . -
The gradient of
is Lipschitz continuous:
This means that the gradient of a smooth function does not change too abruptly, making optimization methods like gradient descent more stable.
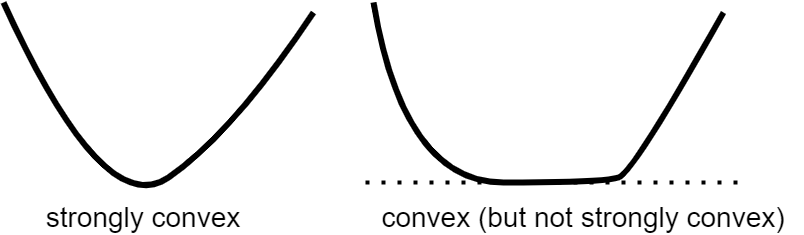
Strongly Convex Functions (Another Approach)
In addition to being smooth, a function can also be strongly convex. Strong convexity strengthens the usual convexity condition by ensuring that the function has a uniform curvature, which guarantees faster convergence in optimization algorithms.
A function that is both strongly convex and smooth enjoys better optimization properties compared to standard convex functions.
Definition (close to L-smooth)
A function
This condition ensures that
So, simply put, strong convexity is a lower bound, while smoothness is an upper bound on how much the function can grow.
Strong Convexity and Smoothness Together
If a function
This means that the function is trapped between two quadratic approximations — one defined by
Once again:
- The lower bound (left inequality) guarantees that the function is at least as curved as a quadratic function with curvature
. - The upper bound (right inequality) guarantees that the function does not grow faster than a quadratic function with curvature
.
Summary
| Concept | Meaning |
|---|---|
| Smooth function | A differentiable function whose gradient does not change too fast. |
| Smoothness condition | |
| Smoothness does not require convexity | A function can be smooth without being convex. |
| Lipschitz gradient | The gradient must satisfy |
| Preservation | Smoothness is preserved under weighted sums and affine transformations. |
| The function curves upwards uniformly, ensuring no flat regions. | |
| The function is bounded between two quadratic approximations. |
Smooth functions are important in optimization because they ensure that gradients behave predictably, making them useful in gradient-based methods. 🚀
In short, a function that is both strongly convex and smooth is easier to optimize, enjoys better theoretical guarantees, and ensures efficient gradient-based optimization. 🚀